Summary
The ItS-RHAD is a wearable haptic device that provides six degrees of freedom feedback to guide arm movements using kinesthetic and skin stretch methods. It's designed for precise proprioceptive guidance in tasks like surgical training and augmented reality.
Background
The field of haptic technology focuses on creating devices that simulate the sense of touch by applying forces, vibrations, or motions to the user. This technology is particularly relevant in areas like virtual reality, teleoperation, and robotic surgery, where tactile feedback can enhance user interaction and precision. In surgical applications, haptic feedback is crucial for providing surgeons with a sense of touch, which is often lost in robotic-assisted procedures. This feedback can improve accuracy and safety, making it an essential component in training and real-world operations. However, current haptic systems often rely on grounded devices, which can be bulky and expensive, limiting their accessibility and practicality in various settings.
Despite the advancements in haptic technology, existing solutions face significant challenges. Grounded haptic devices, while effective, are often large, costly, and require extensive setup, making them less feasible for widespread use, especially in resource-limited environments. Ungrounded devices, on the other hand, tend to focus on unimodal feedback, such as either kinesthetic or tactile sensations, which limits their ability to provide comprehensive guidance. Additionally, many wearable haptic interfaces rely on vibration motors, which are limited in their ability to deliver precise, multi-dimensional feedback. These limitations highlight the need for innovative solutions that can offer high-fidelity, ungrounded haptic feedback in a compact and affordable form, addressing the gaps in current technology and expanding the potential applications of haptic systems.
Technology description
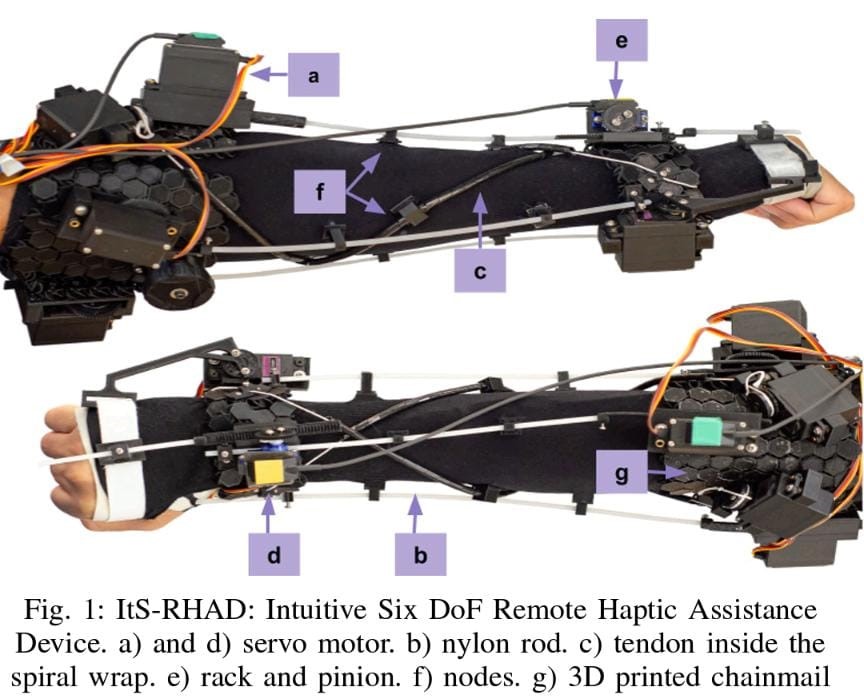
The wearable haptic interface, ItS-RHAD, is a sophisticated device designed to provide six degrees of freedom (6 DoF) haptic feedback to the human arm. It combines kinesthetic guidance and skin stretch to deliver a unique haptic experience called "Referred Torques Mediated by Skin Stretch." The device is constructed from 3D-printed components sewn onto a dual-layered elastic sleeve, with wiring for actuators running between the layers to reduce interference. ItS-RHAD includes a flexible 3D-printed chainmail for force grounding and uses servo motors for actuation, employing both linear and tendon-driven mechanisms to render forces. This allows for precise guidance in complex tasks, as demonstrated in user studies involving directional cues, drawing tasks, and simulated real-world tasks. The design facilitates high-fidelity ungrounded forces, making it suitable for applications in surgical training, rehabilitation, and augmented reality interactions.
ItS-RHAD stands out due to its ability to provide six degrees of freedom ungrounded haptic feedback that closely resemble externally grounded haptic guidance. Most traditional haptic interfaces are either grounded or limited to fewer degrees of freedom, often focusing on unimodal actuation strategies. ItS-RHAD's innovative approach, using "Referred Torques Mediated by Skin Stretch," enables the delivery of multi-dimensional proprioceptive information, which is more intuitive for users. This method allows for precise proprioceptive guidance without the need for a physical anchor, making the device lightweight, portable, and causing minimal obstruction to the user’s natural movements. The combination of kinesthetic and tactile sensations enhances the user's ability to perform complex tasks with high accuracy, achieving sub-centimeter accuracy in translations and orientation errors of under 5◦. This differentiation positions ItS-RHAD as a promising tool for enhancing human-machine interactions in various fields.
Benefits
- Provides six degrees of freedom (6 DoF) haptic feedback.
- Intuitive ungrounded guidance that closely resembles grounded haptic guidance
- Combines kinesthetic guidance and skin stretch for precise guidance.
- Enables ungrounded haptic guidance, reducing setup complexity.
- Constructed with 3D-printed components for cost-effectiveness.
- Facilitates complex task execution with high accuracy.
- Potential applications in surgical training, rehabilitation, and augmented reality.
- Low-cost solution compared to grounded robotic systems.
- Flexible design minimizes interference with natural movements.
- Effective proprioceptive guidance demonstrated in user studies.
Commercial applications
- Surgical training and assistance
- Rehabilitation and therapy
- Augmented reality interactions
- Complex manufacturing tasks
Opportunity
A wearable haptic interface provides six degrees of freedom feedback to the human arm by integrating kinesthetic guidance and skin stretch. It uses a method called “Referred Torques Mediated by Skin Stretch” for ungrounded guidance. Constructed with 3D-printed components on an elastic sleeve, it employs servo motors and tendon-driven mechanisms for force rendering. The device offers precise proprioceptive guidance, applicable in surgical training, rehabilitation, and augmented reality. The University of Texas is seeking a commercial partner to license this technology.